








空基信息系统协同计算架构研究
摘 要:文中分析了多平台协同场景下空基信息系统的计算特点和协同计算需求,并针对以预警机为中心的空基多平台协同,设计了一种协同计算架构,探讨了该架构下空基信息系统的协同计算模式,分析了架构实现过程中需要解决的关键技术问题。基于文中所设计架构,可实现空基信息系统任务软件的高可用和平台间计算任务的按需部署、迁移和协同计算,为构建高可靠、高效能的空基信息系统提供基础计算环境支撑。
关键词: 空基信息系统;机载任务电子系统;协同计算;空基信息系统软件架构
引 言
空基信息系统是以空基平台和网络为基础,通过传感器、决策者和射手之间的信息共享和行动协同,实现打击链路闭环的网络化作战信息系统[1-2]。空基信息系统由空基预警探测系统和空基指挥控制系统组成[3-4],典型的空基信息系统以预警机为中心,协同干扰机、战斗机、无人机等多型空基装备,实现预警探测、情报侦察、指挥控制以及协同打击等各种功能。
近年来,随着各型空基装备的长足发展,尤其是各类无人装备的不断涌现,空基信息系统的参与要素日益丰富,其数据处理需求产生了很大变化。与此同时,深度学习等智能化技术在各类信息系统中的应用日渐丰富,这为空基信息系统大规模数据的智能化处理提供了有力支撑。为此,有必要分析空基信息系统新的计算需求及特点,设计相适应的基础架构,提升空基信息系统的综合效能。
1.空基信息系统计算特点及发展趋势
空基信息系统的计算资源具有相对有限且分布不均的特点。具体来说,与地面各类信息系统不同,空基信息系统受其所依托空基平台在载重、供电等方面限制,计算硬件总量受限,往往无法通过增加物理设备等方式对计算资源进行按需扩展。另一方面,各类空基平台的计算资源分布也不够均衡。以预警机为代表的大型装备在飞行平台的容纳能力上具有优势,其计算资源相对充裕;而以无人机为代表的平台容纳能力相对小得多,其计算资源也更加短缺。
空基信息系统对计算可靠性和计算效率有着极高的要求。从预警探测、情报侦察开始,空基信息系统需要快速处理各类数据,以有效支撑指挥控制指令的产生,最终完成各类任务。流程中任何一个环节的计算失效都可能导致任务的失败。
随着无人化、智能化等新兴技术的不断发展成熟,其在空基信息系统的应用也愈发广泛和深入。以智能化为例,从特定传感器的目标识别等数据处理领域,到信息融合、辅助决策等指挥控制领域,智能化技术正大幅提升着空基信息系统的数据处理能力。伴随这些新技术而来的是空基信息系统在计算方面的一些发展趋势:
1.1 空基信息系统的计算对象呈现出规模化的特点
随着装备的不断发展,预警探测的内涵不断扩大。来自各类主动、被动传感器的数据均可作为预警探测的数据来源。这使得空基信息系统要处理的数据形式十分多样,也不可避免地导致了数据体量的增长。另一方面,随着近年来无人装备的迅速发展普及,空基信息系统需要能够处理来自各类无人装备乃至无人装备集群的数据。这进一步增大了空基信息系统的数据处理压力,空基信息系统的数据处理体量越发规模化。
1.2 空基信息系统对数据通信效率的要求越来越高
空基信息系统参与要素的扩展使得要素之间的协同越发重要,数据通信正是平台间相互协同的基础。因此,空基信息系统对数据通信的需求是不断增长的。空基环境中,各物理平台间通过各种类型的数据链相互通信,数据链的通信带宽本身是很有限的。此外,空中环境复杂多变,空基信息系统还需要考虑各类通信干扰等因素,这更加大了数据的传输限制。以上就要求空基信息系统的数据通信能够在有限的通信带宽和质量下,尽可能提升通信效率,进而提升协同效率。
1.3 无人装备的广泛应用更加凸显空基信息系统可靠计算的重要性
在很大程度拓宽空基信息系统预警探测覆盖范围的同时,相对更加前出的无人装备自身也面临相对更大的生存威胁。因此,有必要从基础计算架构上确保系统的高可靠,在出现由物理损伤等造成的平台失能情况下仍要实现任务的接替,确保任务的完成。
2.空基信息系统协同计算需求
以空基协同态势感知为例,预警机与其他各类特种机、无人机相互分工协作,预警机外各平台担负特定方面的探测和侦察任务,预警机平台则在自身探测侦察的同时,担负整体态势感知和指挥控制任务。处于中心位置的预警机平台与各平台建立通信连接,接收来自各平台的探测和侦察数据,并向各平台下发综合态势信息及指挥控制指令。当预警机之外的各平台间存在相互直接协同需求时,可根据需要建立直接通信。该场景下平台的典型组成如图1所示。
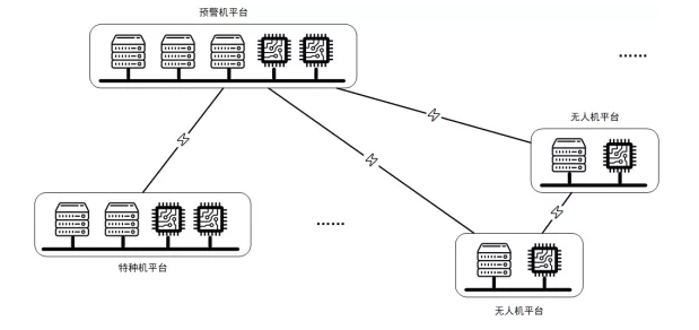
图 1 典型空基信息系统协同场景
多平台协同可克服单一平台在探测、计算等方面的能力局限,有效提升战场态势感知的范围和灵活度。不同平台通过在探测区域、探测方式等方面分工协作,共同完成探测侦察任务;特定平台所执行的任务可根据总体任务执行和态势感知的需要而灵活变化,实现按需切换;当特定平台出现计算资源不足时,可通过“计算卸载”将计算任务传递至具备相应计算资源的其他平台,协同完成计算;在特定平台失效的情况下,可将失效平台的计算任务快速迁移至其他具备相应能力(如特定传感器)的平台,保障整个系统的可用性。
空基多平台协同对各平台任务计算的架构提出了新的要求,主要体现在以下三个方面。
1)计算任务方面
多平台协同要求计算任务具备跨平台部署和动态迁移的能力,这就要求包括嵌入式硬件在内的各类异构计算硬件向上层计算任务提供统一的运行环境,实现任务部署和迁移过程中运行环境的一致。
2)任务数据方面
多平台协同要求在节点间按需建立通信关系的基础上,面向核心数据提供多平台分布式能力,实现关键任务数据在多平台间的分布式同步。此外,为有效降低协同过程中的数据通信需求,需要支持对计算任务运行过程中的动态数据和静态数据进行有效区分,通过任务规划,将可能存在协同需求的静态数据进行预先部署,降低任务执行过程中的数据传递需求。
3)计算资源方面
多平台协同要求中心平台具备对各平台计算资源的整体管理能力,要能够根据任务需求和实时态势,在各平台间进行计算资源的动态管理以及计算任务和计算资源的动态匹配。计算任务和计算资源匹配过程中,要能够充分利用数据采集端的计算能力,尽可能在末端进行全部或部分的数据处理或预处理,从而降低协同过程中的数据通信需求。
3.空基信息系统协同计算架构
结合上述对空基信息系统计算特点和协同需求的分析,设计如图2所示的空基信息系统计算架构。
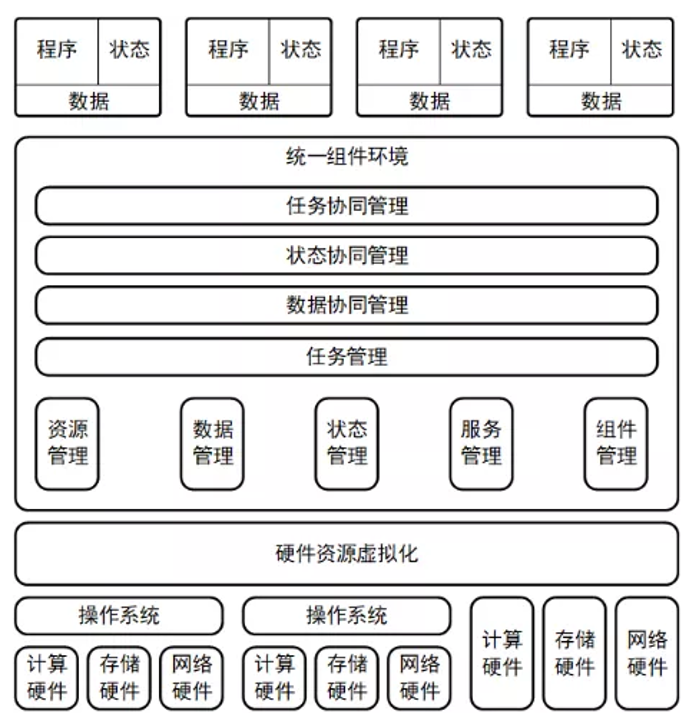
图 2 协同计算架构示意图
架构中,自顶向下分别为应用软件(各类计算任务)、统一组件环境、硬件资源虚拟化和操作系统/各类硬件。其中,硬件资源虚拟化层是本架构的基础,通过该层对各平台的不同类别硬件进行统一的虚拟化,形成抽象的虚拟化资源池;统一组件环境是本架构的核心,它基于虚拟化资源池,为上层应用软件提供统一的运行环境,并进行各类管理、提供各类基础服务。本架构的主要特点如下。
3.1 软件状态分离
应用软件层面,本架构对其进行组件化封装。逻辑角度,封装后的组件细分为程序、数据和状态。其中,程序对应软件的可执行指令集合,其本身是静态的;数据对应程序执行过程中从外部存储器读写的静态/动态内容;状态则对应程序执行过程中在内部存储器读写的动态内容[5]。组件的运行过程可视为静态程序被计算硬件加载之后执行指令、读取处理数据、改变自身状态并输出数据的过程。将组件静态程序和动态状态进行分离,并将数据和状态进行分别处理,从架构上提供数据和状态的统一管理,可实现单平台内计算任务的高可靠保障,并为实现依托于组件的计算任务在平台间的迁移和协同奠定基础。
3.2 计算环境统一
应用软件之下,设计“统一组件环境”层。该层连接应用软件和操作系统,面向各平台各类软件的运行提供一致的基础运行环境。该层功能可细分为资源管理、数据管理、状态管理、服务管理、组件管理、任务管理、数据协同管理、状态协同管理和任务协同管理。
资源管理综合上层应用的资源需求和硬件资源池内的各类资源占用,依据任务模型中预先设定的分配策略,进行资源的分配和动态调整;并对资源和资源的占用进行实时监控管理,为跨平台的资源协同提供依据。
数据管理和状态管理分别为上层应用提供相互隔离的数据和状态访问服务。应用软件通过数据管理和状态管理两类服务,将程序运行过程中的数据和状态集中托管至统一组件环境。统一组件环境在数据和状态集中管理过程中,则可采用分级、分布式等策略[6],实现集中托管数据的高效率和高可靠。
组件管理为上层组件的运行提供基础管理功能,包含组件生命周期管理、运行状态监控、健康状态识别等。同时,在组件管理的基础上,针对面向服务的架构(SOA)等架构的服务化设计需求提供服务管理功能,该功能为服务接口的描述和表达提供统一标准,支持基于统一资源定位符的全系统服务定位,并为服务接口的调用提供数据消息的路由转发。
任务管理为系统内各平台提供统一的任务模型定义,并基于定义的模型,产生并应用相应的组件、服务、资源、数据、状态管理策略。
数据协同管理和状态协同管理面向跨平台协同需求,基于分布式一致性等方法,通过网络通信实现数据和状态在平台之间的分布式管理。任务协同管理则为数据和状态的协同过程提供基于任务模型的统一管理。3.3硬件资源虚拟化
统一组件环境之下,通过“硬件资源虚拟化”层适配对接各平台的各类计算硬件——包含CPU、内存等计算硬件、存储硬件和网络硬件,向上层提供统一的计算、操作接口,实现硬件资源的虚拟化。标准计算硬件可直接通过操作系统内核的相应特性实现虚拟化;对于非标准硬件,如各类FPGA设备[7],可通过单独设计的虚拟化适配器,将资源纳入硬件资源虚拟化层。
4.空基信息系统协同计算模式
4.1 计算协同方式
本文所述计算架构下,应用软件基于统一设计框架进行设计和实现,并运行于统一组件环境中。该设计使得软件具备在不同平台间、平台内部不同硬件设备间的通用能力,这与FACE[8]等架构在应用层所瞄准的目标是相似的。该能力确保不同来源的软件可免适配地部署在环境内任一平台、任一设备上,并实现动态迁移。
为了满足第2节所述空基信息系统协同计算需要,组件还需具备不同平台、不同设备间动态迁移的过程中业务功能延续的能力。本计算架构中,通过数据和状态的跨平台协同满足该需求。当数据和状态分布存储于单平台内时,程序可在不同硬件间自由迁移而不影响程序的运行结果;当数据和状态分布存储于多个平台时,通过数据和状态在平台间的协同实现平台间数据与状态的一致,从而实现程序和业务功能的跨平台迁移。
一般的信息系统中,相较于计算资源,存储资源往往相对充沛。在此背景下,在本架构的实际应用中,可在组件设计时对数据和状态进行精心设计和划分。根据可能的任务协同需要,将组件程序和静态数据预先部署至存在潜在协同需求的节点。空基信息系统运行过程中,只针对状态等动态数据进行分布式协同,从而降低功能迁移过程中的通信带宽需求。
4.2 协同计算应用形式
在多平台构成的空基信息系统中,通过本架构可实现以下几种典型协同计算应用形式。
(1)计算任务平台内协同
随着任务执行过程中战场态势的不断变化,单一平台内部的任务计算需求同样是动态变化的,计算任务在平台内同样存在协同的必要。上述架构下,计算资源的虚拟化可为计算任务在平台内的协同并发提供资源保障,而状态数据的分离和统一管理则可为计算任务在平台内的协同并发提供数据保障。
(2)计算任务跨平台协同
以第2节中空基信息系统多平台协同场景下的组成为例,预警机中心单元在任务执行前进行任务和数据的规划,并将内容同步至外部协同平台;任务执行中,中心单元根据任务模型进行的任务调整,以指令形式通过无线通信分发至各协同平台;协同平台依据接收的任务,基于本地传感器进行数据采集,利用本地计算硬件进行数据处理,并将数据处理结果发送出去;各平台的本地处理结果作为状态信息,根据任务协同模型,按需同步至其他平台;中心节点采集同步来的各类数据,并基于此进行指挥控制、任务管理等相关计算。
(3)计算任务卸载传递
当出现特定平台(称为需求平台)计算资源无法满足任务需要时,系统进行平台间协同计算。此时,中心平台在需求平台物理位置附近匹配具备一致的计算环境、通信带宽和通信质量能够保障协同需要且有富余计算能力的平台(称为协同平台),形成相应指挥控制指令并通过“任务、数据、状态”协同管理模块下发至各相关平台。与此同时,可根据需求建立点对点的高速通信,以更好地保障协同计算。在实际应用中,部分计算任务不可避免地需要特定与平台相关的硬件设备提供计算支持。这类情况下,需求平台和协同平台必须具备一致的计算环境,才能实现计算的协同。如上文所分析,针对此类情况,可通过事先的规划,预判可能的协同需求,并将协同需要的静态数据在任务执行前同步存储至各平台,以降低任务执行时协同的响应时间。
(4)计算任务迁移接替
当出现特定平台失效时,系统进行计算任务的跨平台迁移。此时,中心平台在失效平台物理位置附近规划和匹配具备一致硬件环境的平台(称为目标平台),并形成相应指挥控制和任务管理指令,使目标平台承接失效平台的计算任务。通过任务前的规划,可保障具备相互迁移能力的平台(如配置有相同类别传感器的平台)在任务执行前具备组件程序等静态数据的一致性。另一方面,由于跨平台协同的存在,各类关键动态数据被分布存储于系统中。基于此,可实现任务在平台间的平滑迁移,从而保障空基信息系统的高可靠。
5.空基信息系统协同计算架构的关键技术问题
上述空基信息系统协同计算架构的实现和有效运行,需要解决以下四个关键技术问题。
1)对系统任务和计算任务的有效建模。通过任务模型,对任务中各个关键环节、各类关键数据进行细颗粒度的划分和定义,并借助组件化、服务化等设计方法,将任务具象成为具备一定通用性的组件/服务及其相互关系的集合。
2)面向细颗粒度组件/服务的精细规划和优化。组件和服务的细颗粒度划分给系统带来灵活性的同时,也带来了更大的管理编排压力。只有具备精细化管理能力才能使组件/服务有机协同,实现资源管理效能和空基信息系统运行效能的整体提升。
3)数据链等网络通信的发展。空基信息系统跨平台的信息交互依赖于通信基础设施,通信的带宽、灵活性、稳定性、安全性等因素直接影响系统通信效能,也直接影响协同效能。平台间通信能力的提升必然可为跨平台的协同计算带来更多的空间和可能。
4)跨平台的动态数据分布策略和实现方法。在复杂空基环境中构建数据分布式冗余存储,可以为计算任务的高效协同奠定基础,也是另一个有待解决和验证的关键技术问题。
结 语
本文分析了空基信息系统的计算特点和协同计算需求,并基于此设计了一种协同计算架构,满足空基信息系统的协同计算需求。在装备无人化、计算智能化的当前,该架构可针对性地提供一种空基信息系统协同计算实现思路,满足日益增长的协同计算需求,提升新环境下空基信息系统作战效能,使空基信息系统的各参与平台和要素围绕作战任务,将各自资源充分整合并形成有机整体。
【参考文献】
[1] 陆军,张昭,胡瑞贤.空基预警探测系统技术发展趋势[J].现代雷达,2015,37(12):1-5.
[2] 范鹏,曹晨,葛怀宁.预警机指挥控制功能的作战使用及其发展[J].现代电子技术,2014,37(16):83-86.
[3] 吴永胜,姜邵巍,刘晓敏.面向空基信息系统的公共操作环境研究[J].中国电子科学研究院学报,2018,13(3):247-253.
[4] 吴永胜,李博骁.空基信息系统分层模型及数据互操作研究[J].郑州大学学报(理学版),2015,47(3):55-58.
[5] Philip A L. Dictionary Of Computer Science, Engineering And Technology[M].NW Boca Raton: CRC Press Inc, 2000.
[6] Bohannon P, Parker J, Rastogi R, et al.Distributed multi-level recovery in main-memory databases[C]//Fourth International Conference on Parallel and Distributed Information Systems.Miami Beach: IEEE Press, 1996: 44-55.
[7] Vaishnav A, Pham K D, Koch D.A survey on FPGA virtualization[C]//2018 28th International Conference on Field Programmable Logic and Applications (FPL). Dublin: IEEE Press, 2018:1311-1317.
[8]Brabson S , Anderson T . Evolution of the US Navy’s collision avoidance systems (CAS) to future airborne capability environment (FACE)[J]. IEEE Aerospace & Electronic Systems Magazine, 2015, 30(6):16-23.